

مقدمه
خب شاید این سوال واستون پیش اومده باشه که سروو موتور چیست؟ در حقیقت سروو موتور ماشین کنترلی یک موتور الکتریکی هستش که این موتور به یک گیربکس وصل شده و در کنار این موتور و گیربکس یک مدار الکترونیکی و یک پتانسیومتر(مقاومت متغیر چرخشی) هم وجود داره… در ادامه این مقاله بیشتر با سروو موتور آشنا خواهید شد.
کمی بیشتر...
سروو موتور در حقیقت یکی از نکات مثبتش این هستش که شما میتونید به موتور درجه بدین و به محض رسیدن به اون درجه خیالتون راحت باشه که شفت توی همون موقعیت میمونه… و دو نوع خطی و چرخشی دارن که در RC فقط از نوع چرخشی استفاده میشه…
انواع سروو موتور
سروو موتور ها یکی از قطعات پرکاربرد در زمینه های گوناگون هستند، مثل صنعت که شامل انواع دستگاه های بسته بندی و نساجی و چاپ و تجهیزات پزشکی، پرینتر های ۳ بعدی، سینما های ۳ بعدی، رباتیک و… کاربرد دارند.
در RC
همانند صنعت و سایر زمینه ها سروو موتور ها یکی از پر کاربردترین قطعات در ماشین کنترلی ها نیز هستند. فرقی نمیکنه چه RC ای داشته باشید، قایق کنترلی، هلیکوپتر کنترلی، ماشین کنترلی و حتی در برخی از کوادکوپتر های شرکت Wltoys یا هواپیما مدل یا هر چیز دیگه ای؛ در هر صورت ردپایی از سروو موتور باید باشد.
تفاوت اصلی سروو موتور با موتور معمولی در آن است که سروو موتور قابلیت آن را دارد که شفت آن در یک موقعیت تعیین شده توسط کاربر برود و در آنجا بماند.
در حقیقت اگر بخوام یکم بهتر بگم، پتانسیومتری وجود داره که به شفت خروجی گیربکس وصل شده و دائما موقعیت شفت رو داره میخونه، به محض اینکه موقعیت شفت با موقعیتی که ما اون رو نیاز داریم متفاوت باشه موتور روشن میشه تا شفت به مقدار مناسب برسه…
انواع سروو موتور
اجزا
همونطور که بالاتر اشاره کردیم یه سروو موتور معمولی شامل چرخدنده های متصل به موتور، موتور الکتریکی، پتانسیومتر متصل شده به شفت خروجی گیربکس و یک مدار کنترل کننده هستش که وظیفه روشن خاموش کردن و کنترل ولتاژ اعمالی به موتور رو با توجه به نیاز کاربر و موقعیت پتانسیومتر داره…
نحوه کارکرد سروو موتور
موقعیت خروجی اندازه گیری شده توسط پتانسیومتر، به طور مداوم با موقعیت خواسته شده (حالا چه توسط رادیو کنترل های آرسی یا چه توسط دستگاه های دیگر) مقایسه می شود. هر گونه اختلاف دستور ارسال شده با موقعیت فعلی که توسط پتانسیومتر خونده میشه یک سیگنال خطا در جهت مناسب ایجاد می کنه که موتور الکتریکی رو به حرکت در جهت عقربه های ساعت یا خلاف جهت عقربه های ساعت هدایت می کنه و شفت خروجی را به موقعیت فرمان داده شده انتقال می دهد. هنگامی که سروو به این موقعیت می رسه، سیگنال خطا کاهش می یابه و بعد صفر میشه و در اون نقطه سروو می ایسته.
نگاهی دقیق تر به ساختار سروو
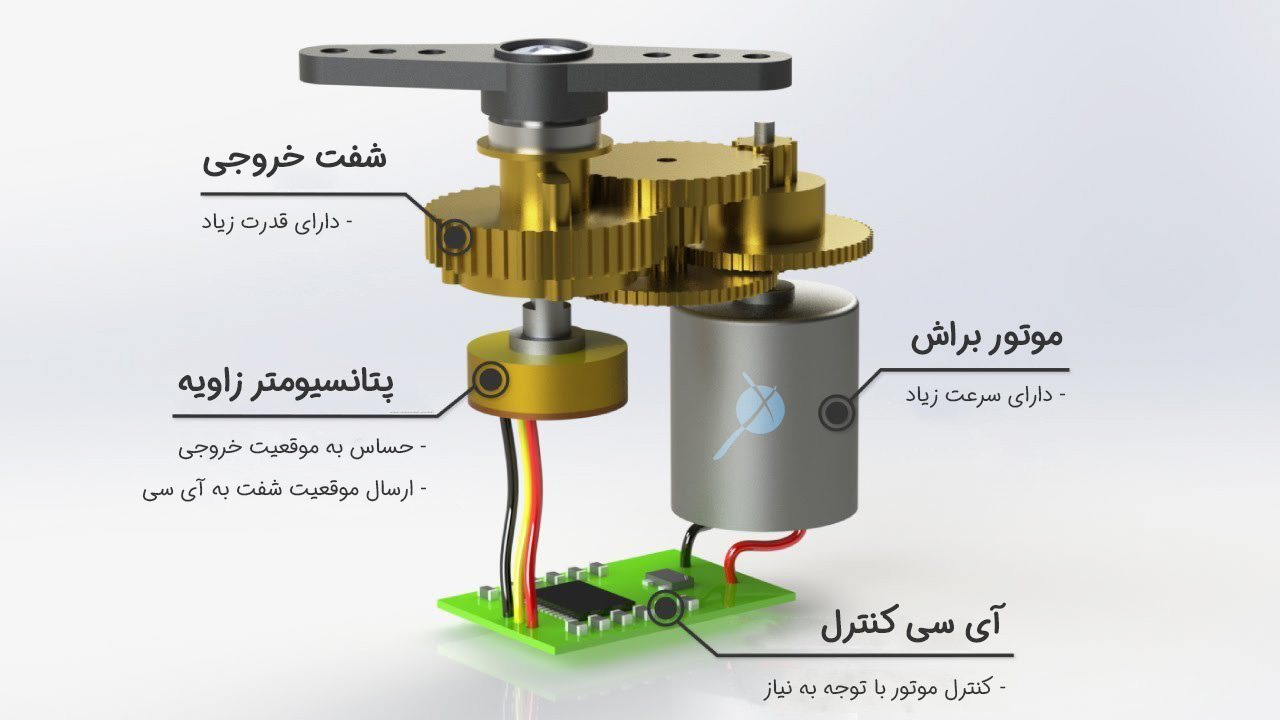
خب، درسته که توی قسمت قبل توضیحات لازمه رو دادم، ولی گفتم شاید این مدل سازی سه بعدی بتونه بیشتر کمک کنه تا متوجه بشین دقیقا سروو موتور چه طوری کار میکنه؟
همونطور که داخل عکس مشخصه، ما یک موتور براش داریم که دارای سرعت زیاد و قدرت کم هستش. این موتور براش به یک گیربکس متصل شده. شفت خروجی این گیربکس، یعنی همون هزار خاری که ما روی سروو مشاهده میکنیم به یک پتانسیومتر به اسم پتانسیومتر زاویه کوپل(متصل) شده. یه آی سی کنترل هم داریم که به یک H-Bridge متصل شده یا بهتره بگم یه آی سی داخل برد سروو موتور وجود داره که این آی سی وظیفه کنترل رو بر عهده داره. حالا شاید بگین کنترل چه چیزی؟ الان میگم؛ اطلاعات پتاسیومتر زاویه به آی سی کنترل ارسال میشه و موتور هم تحت کنترل همین آی سی روی برد سروو هست. موقعیت مورد نظر سروو موتور هم که ما میخواییم سروو بهش برسه و اون مقدار بچرخه هم به همین آی سی ارسال میشه. مرکز کنترل سروو موتور که همون آی سی باشه؛ با استفاده از موقعیت پتاسیومتر و مقدار درجه ارسال شده، میاد و موتور رو در جهت مناسب با سرعت مناسب میچرخونه!
خب پس یه جمع بندی کنیم! ما یه آی سی داخل برد کنترل سروو موتور داریم که میتونه با خوندنِ مقدار مقاومتِ پتانسیومتر زاویه بفهمه الان موقعیت شفت گیربکس یا همون خروجی سروو موتور کجاست. با توجه به این موقعیت و مقدار موقعیت خواسته شده در صورت اختلاف موتور براش روشن میشه تا به درجه مورد نظر برسه.
بزارید یه مثال بزنم تا کامل متوجه بشین؛ فرض کنین یه سروو داریم که ۱۸۰ درجه میچرخه. و سروو در حال حاضر در موقعیت ۹۰ درجه قرار داره. میخواییم سروو رو از ۹۰ درجه برسونیم به ۱۰۰ درجه. مقدار درجه خواسته شده ما که ۱۰۰ درجه باشه به آی سی سروو موتور ارسال میشه. حالا آی سی کنترل داخل برد سروو موتور متوجه میشه مقدار درجه خواسته شده با درجه ای که پتانسیومتر داره اعلام میکنه متفاوت هست و این یعنی سروو در موقعیتی که ما خواستیم نیست. پس میاد با روشن کردن موتور در جهت مناسب گیربکس و شفت رو درجه ای که میخواستیم یعنی ۱۰۰ درجه میرسونه و چون پتانسیومتر هم چرخیده متوجه میشه شفت خروجی به جایی که ما خواستیم رسیده و موتور رو خاموش میکنه!
سروو موتور ها و آرسی
نگاه اولیه
در نگاه اول به سروو های آرسی اول از همه شفت خروجی و قاب سروو موتور به چشم میخورد، با کمی دقت بیشتر پایه های کناری سروو موتور برای پیچ کردن و پیچ ها در پشت و سیم و کانکتور آن نیز دیده می شوند. سروو های آرسی عموما دارای کانکتور JR بوده و با ۳ سیم به رسیور متصل میشوند. (دو سیم مثبت و منفی برای ولتاژ ورودی و یک سیم برای فرمان یا موقعیت مورد نیاز) ولتاژ ورودی اکثر سروو های بین ۴.۸ الی ۶ ولت هست.
در RC ها سروو ها عموما برای تعویض دنده، انتخاب قفل دفرانسیل یا هرزگرد، تنظیم بال های هواپیما، میزان تراتل برای موتور های سوختی و سروو موتور ماشین کنترلی عموما برای ترمز در ماشین کنترلی های سوختی؛ و صد البته فرمون استفاده میشه… وظیفه کنترل دور موتور و ترمز موتور در ماشین های الکتریکی بر دوش اسپید کنترلر هستش…
نحوه خرید سروو موتور مناسب
سروو موتور ها اطلاعات فنی بسیار ندارند و مهم ترین گزینه های برای خرید یک سروو موتور قدرت(تورک) سروو موتور و سرعت سروو موتور و البته وزن اون در مدل های پروازی هست. به نظر بنده برای ماشین های کنترلی بهتره همیشه و همیشه سروو موتور با گیربکس فلزی تهیه بشه به این خاطر که سروو موتور های پلاستیکی از مقاومت بسیار پایینی برخوردار بوده و عموما زود دچار مشکل میشوند. امیدوارم که با مطالعه این مقاله جواب سوالتون یعنی سروو موتور چیست؟ رو گرفته باشید. اگه انتقادی سوالی چیزی دارید خوشحال میشیم در قسمت نظرات اون رو با ما در میون بزارید.
و خیلی ممنونیم که مارو تا آخر این مقاله همراهی کردین…